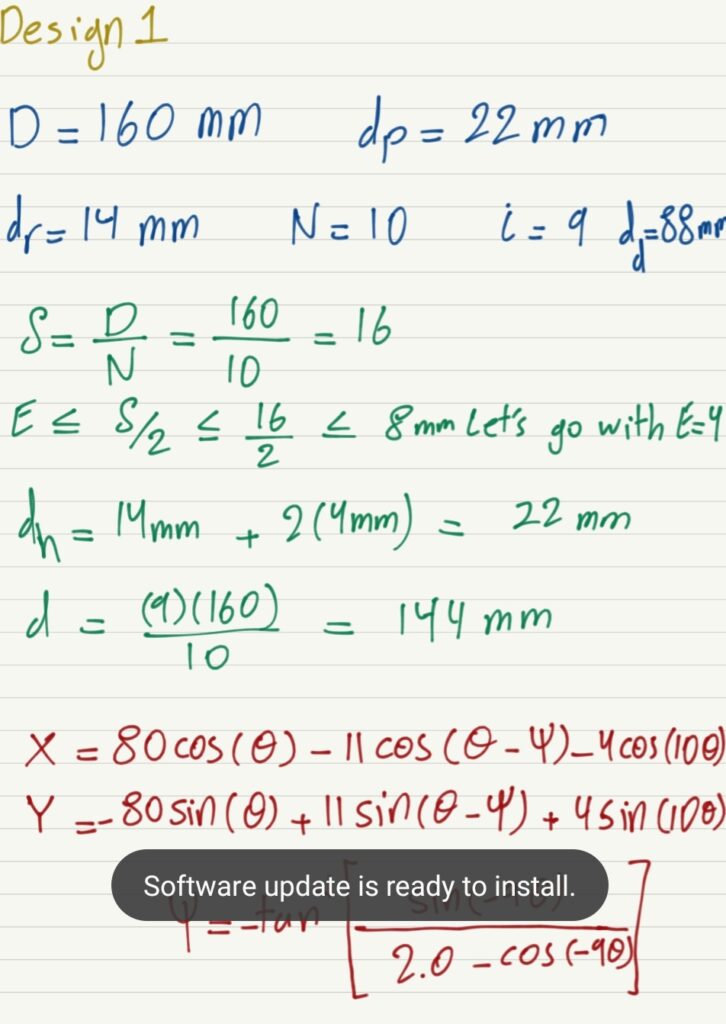
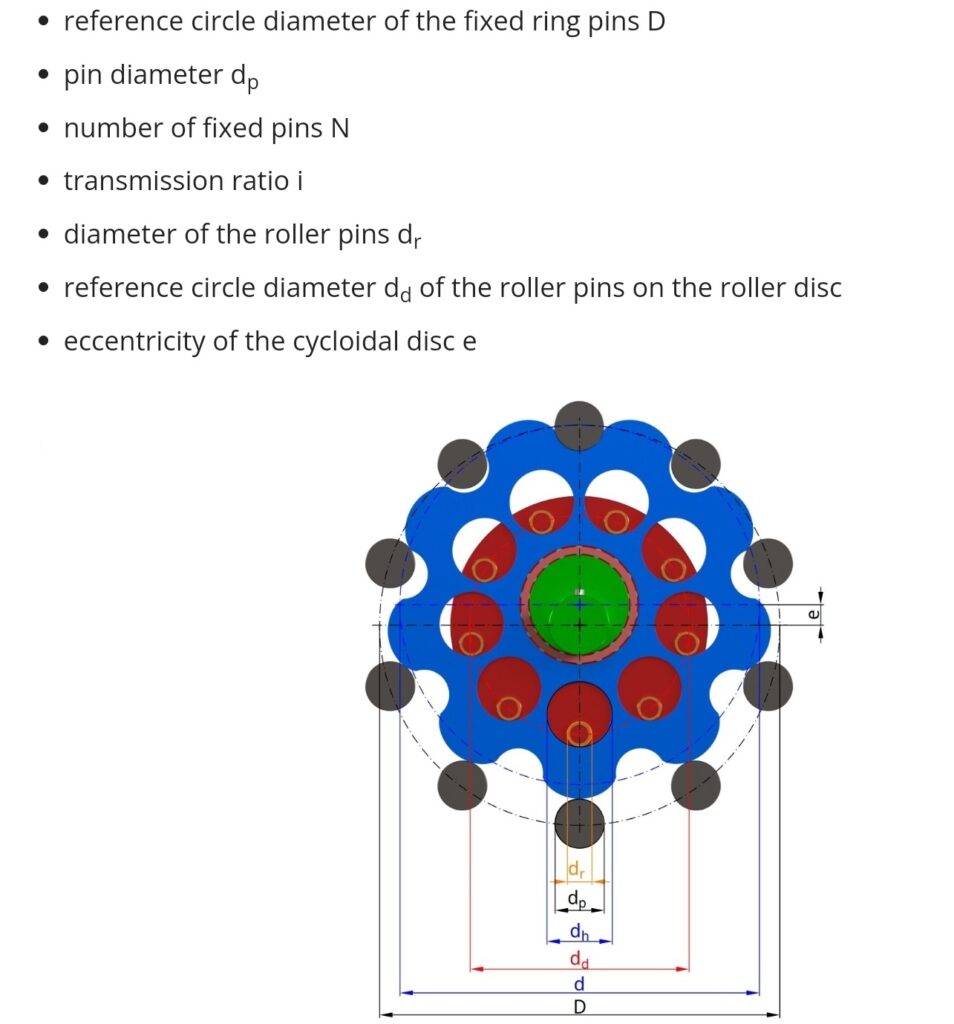
To design a cycloidal driver one must know a few important parameters such as the transmission ratio, the base circle diameter, the eccentricity, and the parametric equations that give the rotor its unique shape. Refer to figure 8 and 9 to see the selected design parameters for my design.
To create the unique rotor shape one can use the parametric equations listed below. Note that the parametric equations can be entered in SOLIDWORKS manually. Open a sketch then select the spline tool. Under the spline tool drop-down menu select Equation Driven Curve. In the Property Manager Select the Parametric equation and enter the equations listed below.
X(Θ, ψ) = Rcos(Θ) – Rrcos(Θ – ψ) – Ecos(NΘ)
Y(Θ, ψ) = -Rsin(Θ) + RrSin(Θ – ψ) + Esin(NΘ)
ψ = -tan-1[(sin(1-N)Θ) / ((R/(EN)) – cos(1-N)Θ)] for 0 ≤ Θ ≤ 360
where:
R = Base circle of housing rollers radius
Rr = Housing roller radius
E = Eccentricity
N = Number of housing rollers
The next most important task is to find the transmission ratio of the gearbox. Note that the transmission ratio is purely related to the number of housing rollers and the number of lobes on the rotor. The transmission ratio has nothing to do with the size of the gearbox and can be calculated using the following equation.
i = n / (N – n)
where:
N = Number of housing rollers
n = Number of lobes on a rotor
The base circle diameter can be calculated using the following equation:
d = iD/N
Where:
D = pitch circle diameter of the housing rollers
The eccentricity is calculated based on the equation below:
E ≤ δ/2
Where:
δ = D/N
Finally, the rotor output hole diameter is calculated using the following equation:
dh = dr + 2E
Where:
dh = Rotor output hole diameter
dr = Output roller diameter